Prototypes
Our initial concept involved equipping a quad track robot with multiple cleaning options to effectively clear and clean blockages within sewer pipes. The robot's tracks would feature extendable and retractable capabilities, enabling it to adapt to various sizes of sewer pipes and effectively navigate through any obstructions encountered within the pipeline. This adaptable system relied on its innovative design and versatile tools to efficiently clean and maintain city sewer lines.
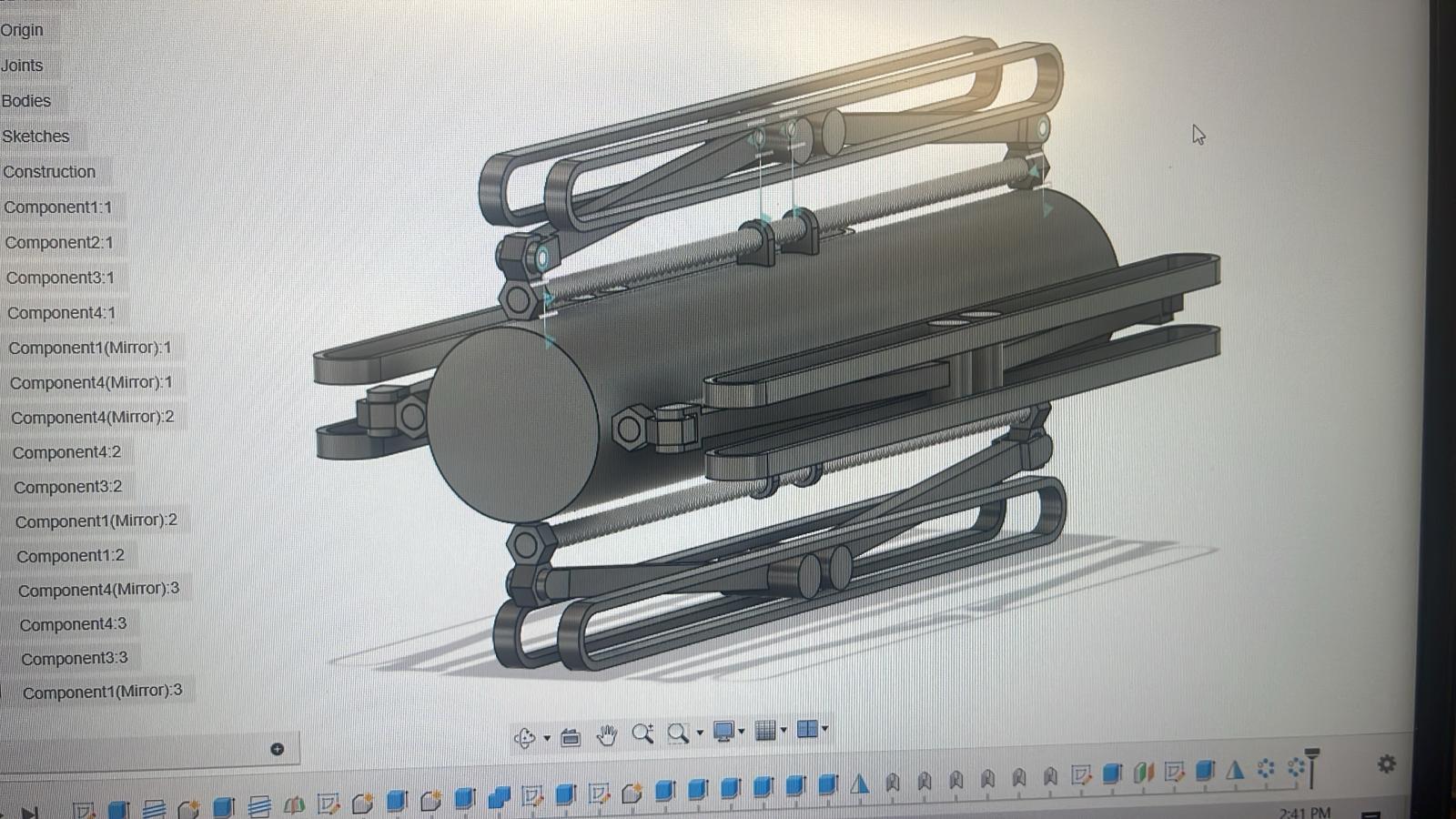
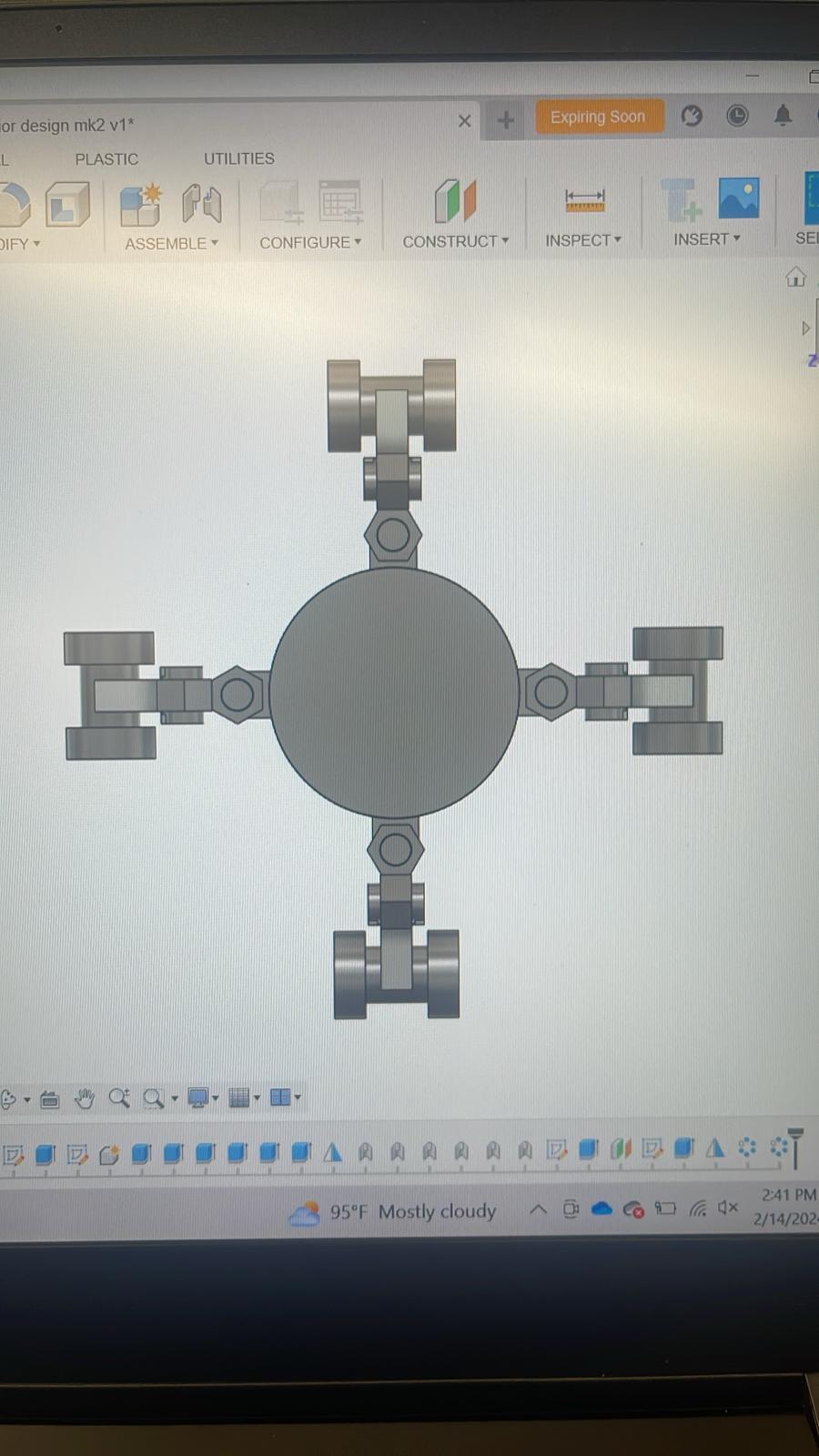
CAD Prototype:
These CAD prototypes were our original idea for the robot. These models were our first prototypes that showed a rough idea of what we had in mind at the time.
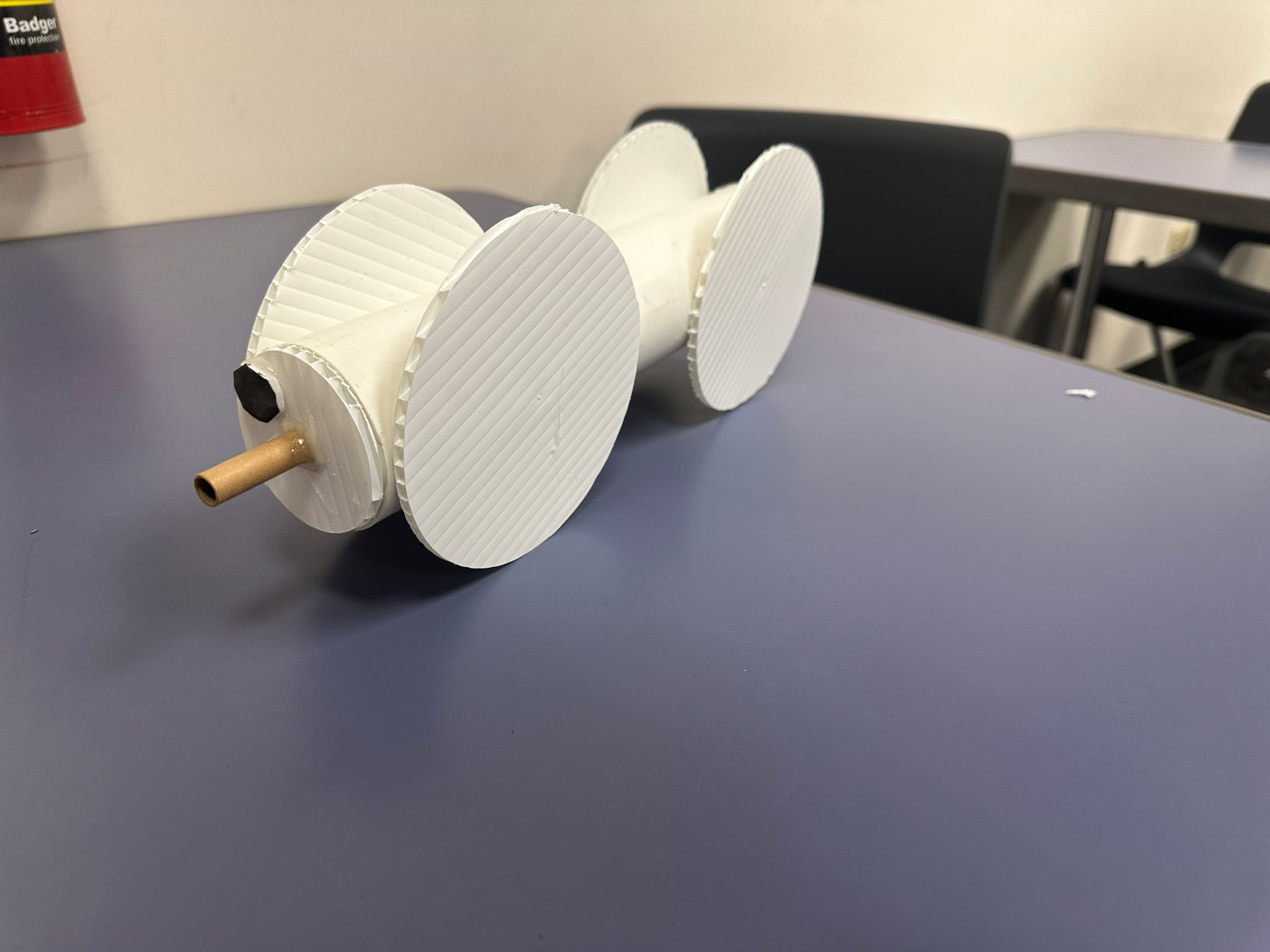
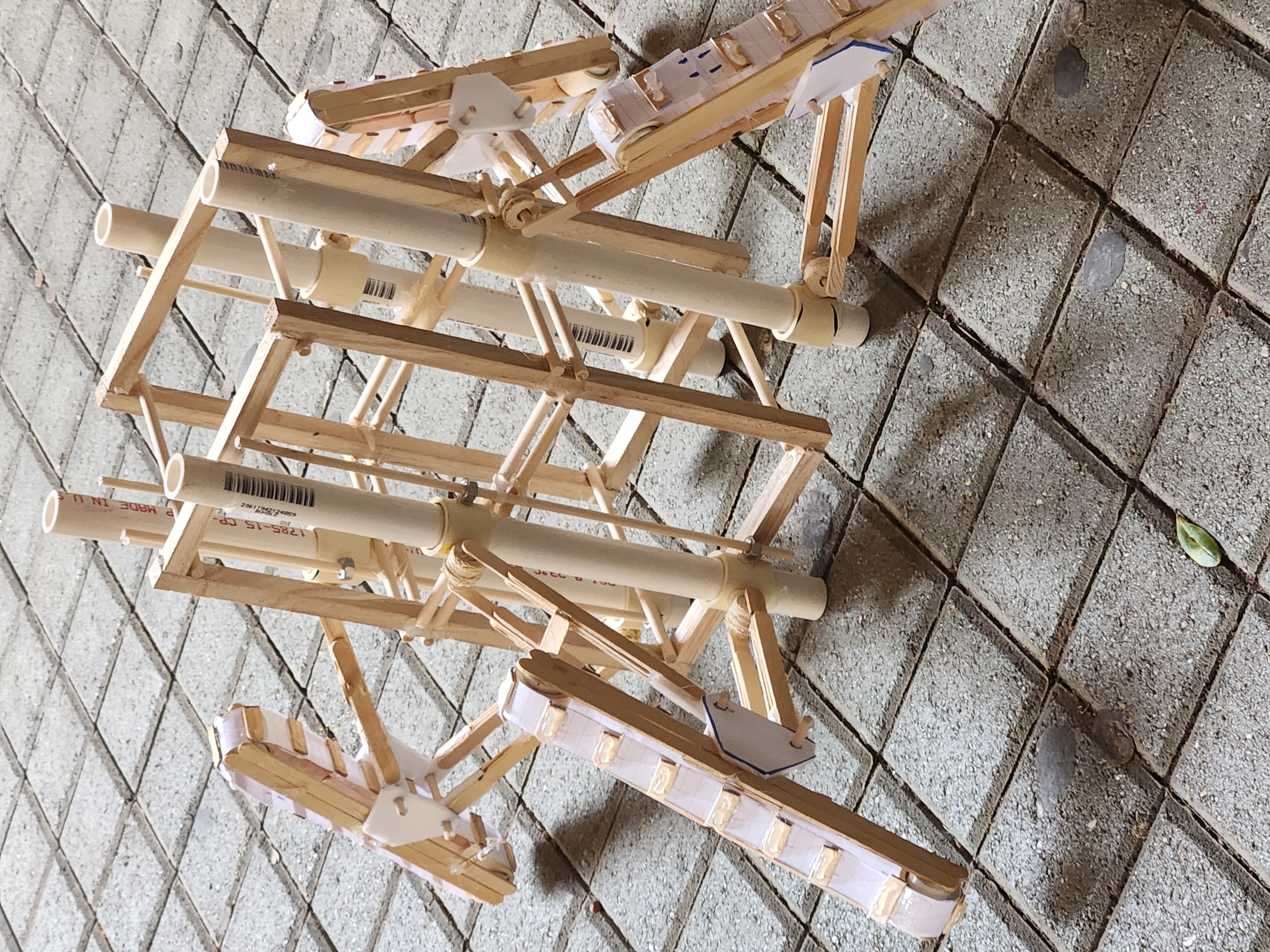
Office Depot Prototype:
This prototype was our first physical model that our group had developed. We had a rough idea about what we wanted, and what we needed. Using our previous CAD prototypes as a basis, we built this "Office Depot" prototype to have a physical representation of what we wanted to achieve.


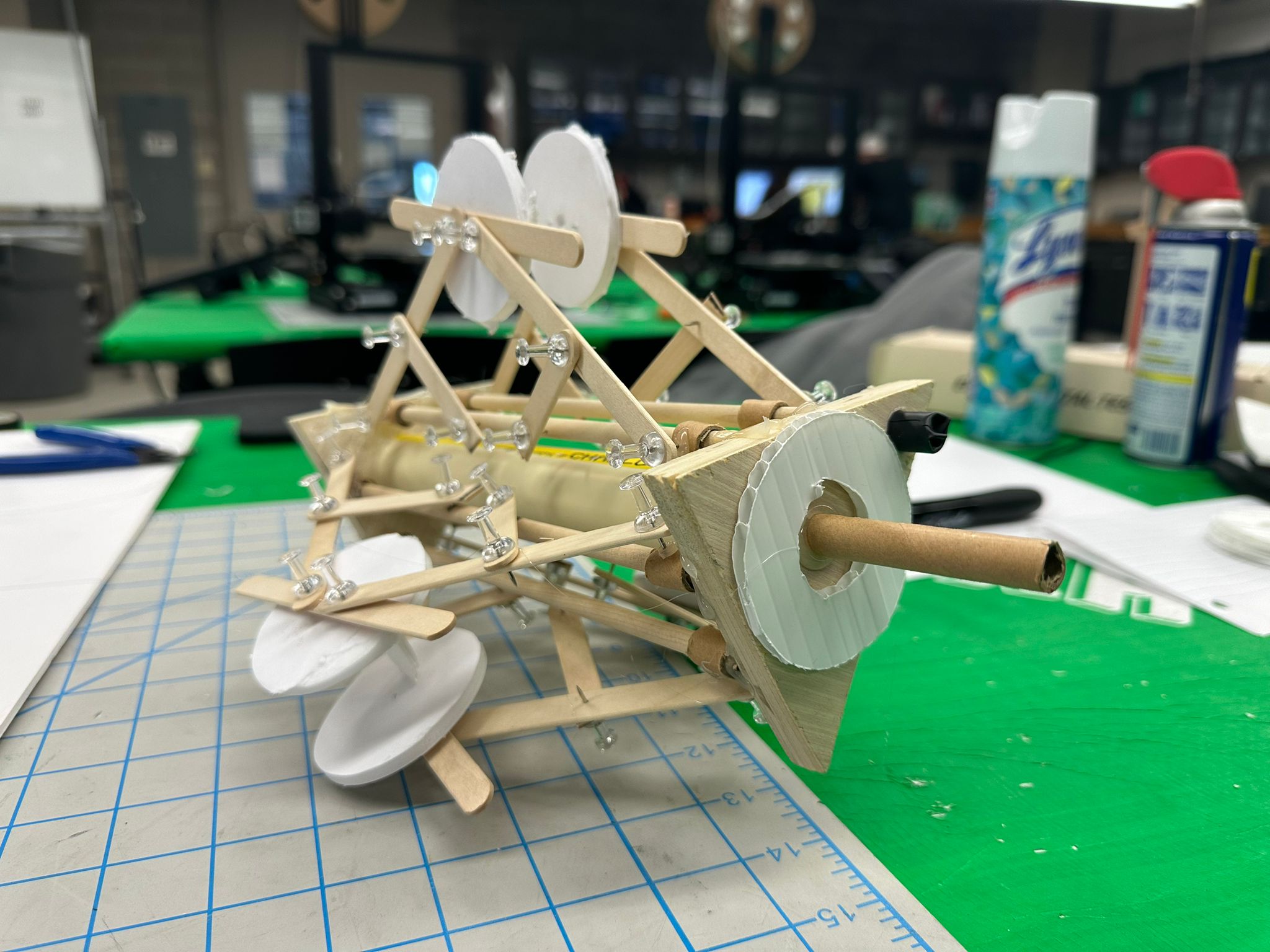
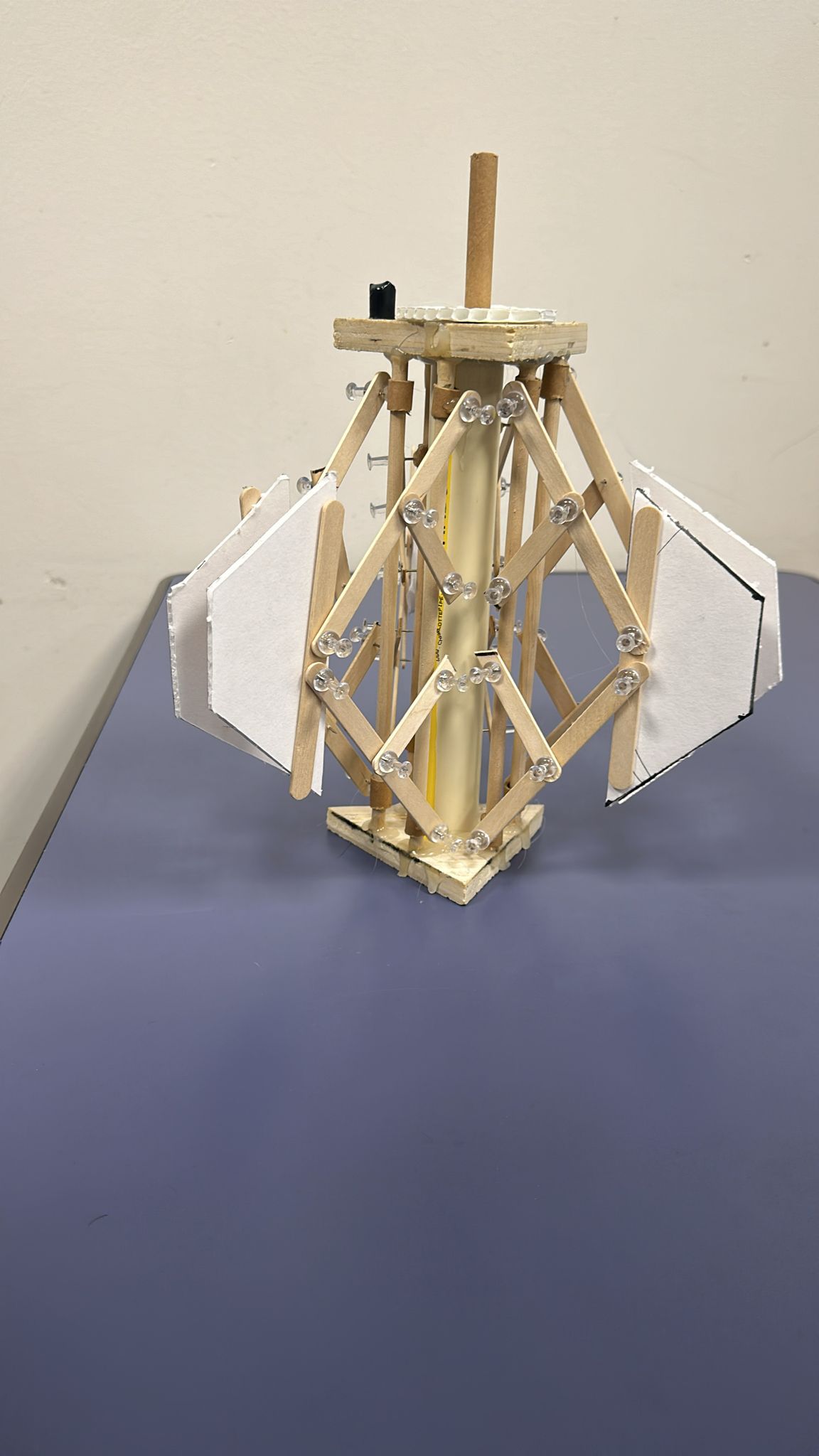
Concept Variant Models:
These models were made based on our concept variants. They are rough models that represent a physical idea of what our variants would look like. This helped us differentiate between the different mechanisms we had in mind and gave us a clearer picture as to what would work best for our actual robot.