Fluid Mechanics Calculations
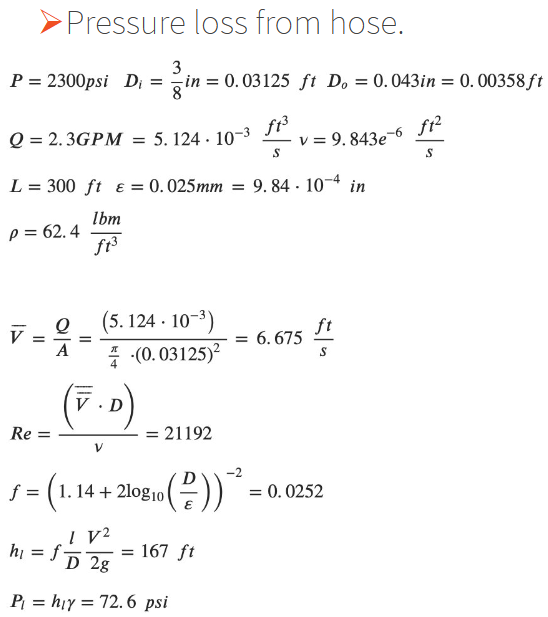
Once we had an idea of what we wanted the robot to do, we had to get a few calculations to make sure that the robot could withstand everything it would have to do. Since we knew we wanted to use a water jet to aid in removing debris, we needed to calculate how much force the robot would be under when using said water jet. Assuming we used a pressure washer with a pressure of 2300 psi, an inside diameter of 3/8 in, and an outside diameter of .043 in, we first calculated the pressure loss from the hose.
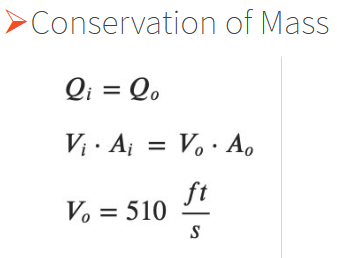
We then used the conservation of mass to find the velocity of the water once it has left the pipe.
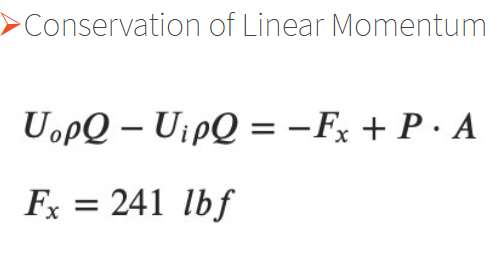
Once that was done, we used the conservation of linear momentum equation to find the force of the water exiting the pipe.
Buckling Calculations
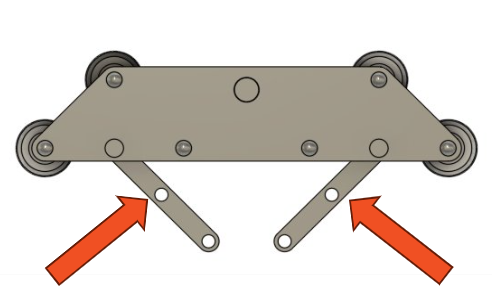
One of the other things we needed to know was if the linkage system would be able to support the strain it would be under throughout the process. In order to find this, we did some buckling calculations assuming two different materials, acrylic and aluminum.